



電気情報工学は「情報の生成、伝達、変換、認識、利用などの観点から、その性質、構造、論理を探求する学問、およびその具体化を行う計算機を中心とする情報機器および情報システムのハードウェア、ソフトウェアの理論と実際に関する学問分野」であり、現代社会の産業基盤、生活基盤として欠くことのできない技術となっています。電気情報工学は、電気・電子工学、通信工学、計算機科学などを基礎とし、これら幅広い科学技術を複合化し、新たな先端技術領域を産み出しています。
電気情報工学科では、電気工学と情報工学の教育・研究を通じ、情報通信技術が社会に及ぼす影響を配慮し、時代の要請に応え得る、電気・情報・通信関係の広範囲な問題に対する適応能力を習得し、さらに、未知の問題を自らの手で解決していく自主性と独創性を持った人材を育成します。
知識情報処理工学

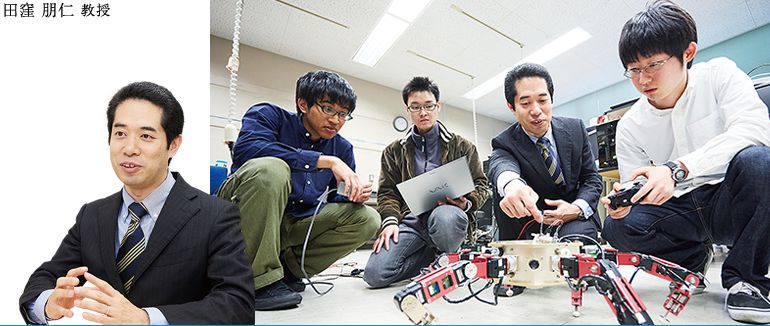

当研究室の研究テーマのひとつの柱が多脚ロボットの開発です。現在取り組んでいるのが多脚ロボットのアプリケーション化で、実社会への応用を目的に、用途別にロボットの動きを標準化することをめざしています。具体的には橋梁の点検作業などの現場を想定し、構造物を登り、検査・撮影などを行うロボットの開発が目標です。
学生たちは3DCADを使って、各自がロボットの設計を手がけます。その際に注意しなければならないのが、画面上では自由自在に何でもできるということ。例えば、画面上でボディを削ったり、穴を開けたりするのは簡単ですが、実際にそれを製作しようとすると形状的に無理があったり、技術的に不可能であるといったケースがよくあります。学生たちは、自ら設計したものを2次元の製図に落とし込む段階でそれらのことを肌感覚でつかみ、設計を通じて3DCADの知識・技術を育んでいきます。

毎年11月に茨城県つくば市で開催されている「つくばチャレンジ」という移動ロボットの大会にも参加しています。これは、つくば市内の遊歩道などの実環境を移動ロボットに自律走行させ、「一旦停止して歩道を渡る」といったさまざまな課題をクリアしながら、スタート地点に戻ってこられるかを競う大会。私たちの研究室では2014年から参加し、課されるタスクが増えるのに対応して、日々ロボットのハードウェアと制御するプログラムの向上に取り組んでいます。本大会までには試走する機会が数回あり、その際にレーザーレーダーでデータを取って地図を作り、経路のプログラミングを構築する中で、より実践的にプログラミングを学習。本番ではセンサーが上手く反応しなかったり、悪天候で機器にトラブルが出たり、思うようにいかないことも少なくありませんが、その大変さも含めてモノづくりの楽しさや醍醐味も実感します。
紹介ビデオ:①電気情報工学科 学科紹介 (30MB)>>
電気情報工学科研究分野一覧
エレクトロニクス領域
現代社会における情報の担い手は電気信号・磁気信号・光信号などの物理量であり、モノづくりにおいて重要なこれらの物理量を高効率・高精度に制御する原理や最先端デバイス技術の研究を行っています。
具体的には、光増幅技術や増幅型光非線形デバイスを用いた光機能システム、光の特性を活かして3次元画像情報の取得・表示や生体計測などを行う情報フォトニクス技術、スマートエネルギーシステムのキーデバイスと成り得る超小型薄膜電力センサーやマイクロ電磁デバイス、スピントロ二クスなどのハードウェアを中心とする研究を行っています。
紹介ビデオ:④エレクトロニクス領域研究紹介 (22MB)>>
光電子工学
光通信に適用可能な半導体レーザや光直接増幅技術、光波長変換技術を駆使した光機能デバイスの研究、物体の三次元形状計測と立体表示、生体情報計測等の光情報工学の研究を行っています。

- 半導体光増幅器を用いた光直接増幅の実験風景
スマートセンシング工学
人間行動や生理量の非拘束計測のためのセンサ開発から、それらセンサ群によるデータ収集ネットワークさらには、収集後の大量データの統計解析やマイニング手法の研究を行っています。応用として在宅独居高齢者の見守りや看護支援のシステム開発に取り組んでいます。

スマートエネルギー
新しい省エネ方式を用いた電子デバイスの研究を行っています。従来のデバイスでは電流のみを使って情報を伝搬し、情報の処理を行っていますが、電流ではなくて“スピン流”という磁気的な流れを用いて情報を伝搬するデバイスを研究しています。

- 電子デバイス作製のための多層膜蒸着装置




情報処理領域
情報処理領域では、現代社会が要求する新しい価値の創造を目指し、ハードウェアとソフトウェアの専門知識を有機的に融合させた研究を行っています。具体的には、3D映像・眼鏡型ディスプレイ・ウェアラブルコンピュータ等によるヒューマンインタフェース、内視鏡やヘルスケア等の医工連携、確率・統計的手法に基づいた信号処理やデータ解析、視覚情報処理・パターン認識等の人や生物が行う情報処理の工学的モデルとそのロボットや医用画像処理への応用、生物を規範とした脚型ロボットの制御、人間に近い環境認識や行動計画を獲得するための強化学習などの研究を行っています。
紹介ビデオ:②情報処理領域研究紹介 (97MB)>>
情報システム工学
3Dディスプレイと3Dカメラを組み合わせた3D映像インタフェース、眼鏡型ディスプレイ、ウェアラブルコンピュータ、新しい内視鏡の研究や医用検体管理およびヘルスケアの研究を行っています。

- 網膜投影型ディスプレイ
- 3Dカメラと3Dディスプレイでの表示例
情報処理工学
観測された生の信号やデータから有益な情報を抽出するための方法論である統計的信号処理や、生物や人間が行う情報処理の工学的モデルに関する基礎研究とともに、それらの知見を情報通信分野をはじめ知能ロボットや医用画像処理など様々な分野のシステムへ応用する研究を行っています。

- 電波を操る信号処理
- レントゲン画像上で、肩甲骨と上腕骨の一部を検出
知識情報処理工学
生物を規範とした多脚ロボットや人間の生活環境に適応が期待されているヒューマノイドロボットの運動制御に関する研究や、人間に近い能力を持つ人工知能の開発をめざし、ロボットがタスクを実行しながら適切な環境認識と行動政策を獲得する強化学習の研究を行っています。

- 腕脚統合型ロボットASTERISK:脚の配置を対称にすることで不整地の歩行や狭隘部の移動を可能としている






情報通信領域
情報通信領域では、情報通信ネットワーク、情報通信システムをはじめ情報通信に関わる幅広い分野を研究対象としています。次世代の情報通信を支える高度に進化した技術として、高速化、大容量化、高信頼性化、低消費電力化などの技術開発に挑戦しています。また、これまでに培った知見を積極的に他分野に融合し、災害救助ロボットネットワークの開発や、健康・スポーツ、医療、福祉への応用など、新たな研究分野を開拓しています。情報通信領域は、これらの研究成果を通じてより安全で安心な社会基盤の構築に向けて貢献していきます。
紹介ビデオ:⑤情報通信領域 (213MB)>>
情報ネットワーク工学
ネットワークをより身近に、そして安心して使うための次世代の有線ならびに無線ネットワークの技術開発に取り組んでいます。ネットワーク技術が進むべき方向性として、高速化、大容量化、高信頼性化、低消費電力化などの観点から研究・開発を行っています。

- インターネットの情報を宛先ごとに振り分ける高性能ルータの試作と評価実験
マルチメディア工学
多様化するメディアを統合的に扱い、ネットワークと融合した新しい情報流通基盤の確立をめざした研究を行っています。分散化された情報を高速かつ確実に見つける方法、質の高いコミュニケーション技術の確立、携帯デバイスを活用した新しい通信モデルなどを研究開発しています。

- 腰部に装着した心電計と加速度計
- トレッドミルを用いた生体センシング実験
制御システム理論
マルチエージェントシステムの分散・協調制御に関する研究を行っています。特に、離散事象システムや自律ロボット群の分散制御法則を設計し、実世界の様々な応用を目指しています。

- マルチロボットのフォーメーション制御
通信システム工学
光通信や無線通信における通信路符号や多重アクセスのための拡散符号、複数のロボットを無線通信でつなぐネットワーク・ロボットとその応用、無線情報通信技術の健康・スポーツ・医療分野への応用、無線通信システム中での位置推定技術とその応用などに取り組みます。

- 20台のロボットを無線でつないだ実験





分散システム工学
多数のコンピュータがネットワークで接続された分散システムによって、さまざまなサービスを提供する方式を研究しています。また、分散システムを実現するための基盤ソフトウェアや分散システムを利用したアプリケーションの研究開発も行っています。

- オーバーレイネットワークを用いた位置情報付き映像配信システム
情報基盤工学
インターネットやクラウドなどの情報基盤は、もはや現代社会にとって欠くことのできない重要な存在となっています.このような情報基盤を安全、確実かつ効率的に動かし続けるためのさまざまな技術や手法について研究しています.

- リアルタイムに発生する大量のデータを分析するためのサーバシステム
知識情報システム工学
情報検索、人工知能、ユーザインタフェースに関する研究を行っています。情報(テキスト)の抽出と整理を中心に、Webインテリジェンス、ライフログ、図書館情報学などを研究しています。

- Webインテリジェンス: 氏名を入力してWeb上から情報を取得し、履歴書を作成、地図上に表示
- ライフログ: カレンダー、Twitter、LINEなどから情報を抽出して記憶の想起を支援
空間情報システム工学
人間の行動はいつも地球空間上の位置と関係します。例えば、さまざまな資料から取り出した人間活動に関連する位置や地図情報を活用することで、地域の歴史を知ることや、これからのまちを考えるヒントとなります。このような位置・地図・空間といった情報を、地域社会の個性を尊重したまちづくりや防災・減災などに応用する研究を行っています。

- 様々な地図情報を重ね分析するWebシステム
- タブレット端末を用いた現地調査





紹介ビデオ
- ①電気情報工学科 学科紹介 (30MB)
- ②情報処理領域研究紹介 (97MB)
- ③応用システム領域研究紹介 (142MB)
- ④エレクトロニクス領域研究紹介 (22MB)
- ⑤情通信通領域 (213MB)
取得できる資格・卒業後の進路
取得できる資格
- ・高等学校教諭1種免許状(工業)
- ・安全管理者(労働安全衛生法)(学科共通)
- 工学部を卒業し、2年以上産業安全の実務経験のある者は 安全管理者に就任できます。(主務官庁、厚生労働省)
2019年度卒業生の進路状況
卒業生40名(大学院進学28名 就職11名 その他1名)2019年度電子情報系専攻修了生の進路
修了生62名(進学2名 就職60名 その他0名)2019年度電子情報系専攻修了生の主な就職先
旭化成、関西電力、京セラ、近鉄グループホールディングス、ソニー、ソフトバンク、ダイキン工業、デンソー、トヨタ自動車、パナソニック、南海電気鉄道、日立製作所、富士通、本田技研工業、三菱電機 ほか
アドミッションポリシー
高度な情報化社会を迎え、広い視野と電気・電子工学、コンピュータ、情報処理、通信、制御などの幅広い関連技術を基礎とする、柔軟な応用能力を身につけた研究者・技術者が望まれています。本学科では、電気・情報・通信関係の広範囲な問題に対処する適応能力を習得し、さらに、未知の問題を自らの手で解決していく自主性と独創性を持つ技術者・研究者の育成を目標としています。そのため本学科では次のような人を求めています。-
1.数学や理科など数理系の基礎学力を備えている人。
また、英語、国語、社会などの人文・社会系科目にも関心をもち、一定の学力を備えている人。 -
2.情報工学分野に対する興味と探究心が旺盛で、新しい技術の開発に熱意のある人。
意欲を持って幅広い分野の勉学ができる人。 -
3.趣味などでプログラムを作ったことがある人。
あるいは、現状の情報機器に不満を持ち、より利便性が高い情報機器を開発してみたいという意欲が旺盛な人。
電子機器やロボットの制御に興味のある人。 -
4.自主・自立の精神が旺盛で、広い視野を持ち、倫理観のある人。
社会の中で自分をも他人をも活かす気持ちを持ち、それに向けて努力できる人。 -
5.自己表現力があり、他人とのスムーズなコミュニケーションができる人。
どんなことにも積極的かつ忍耐力をもって取り組むことのできる人。
多様な観点から物事をみることができる人。
![]()
![]()
Copyright © 2025 大阪市立大学工学部 All Rights Reserved.